动态规划
动态规划的思考
首先,算法一般是可以用枚举来发现规律的,不是100%,因为有些问题的计算,是可以通过数学公式反而直接算出来了
算法都是一个过程,从规模从小到大发现规律或者从规模大到小发现规律
递推问题规律
- 从规模小的问题到规模大的问题,规模大的问题依赖仅仅规模小的问题的结果,那么这样可以避免重复计算小规模的问题。比如求一个等差数列的和,这种问题,就是仅仅依赖了前一个子问题的结果
比如,1,2,3,4,… 这个数列如果不用公式计算,就是不断累加前一次的结果。 - 规模大的问题,依赖多个小规模的问题的结果,这种情况下就很可能存在重复计算,为什么呢?
比如斐波那契数列,如f(n) = f(n-1) + f(n-2) -> f(n) = (f(n-2) + f(n-3)) + f(n-2),如果f(n-2)这个函数没有计算缓存的话,那么就会导致重复计算。有解决办法吗?有,存储已经计算过的值,如果当前这个规模问题已经计算过就立即返回结果,备忘录模式
- 从规模小的问题到规模大的问题,规模大的问题依赖仅仅规模小的问题的结果,那么这样可以避免重复计算小规模的问题。比如求一个等差数列的和,这种问题,就是仅仅依赖了前一个子问题的结果
路径问题规律
比如路径问题,寻找从A点到B点,有多少条路径。因为目标比较明确,从感觉上来看,这个问题和规模B点的问题相关性最大,所以如果从A点作为思考,这会出现一个问题,有些情况下需要考虑回溯。
如下图: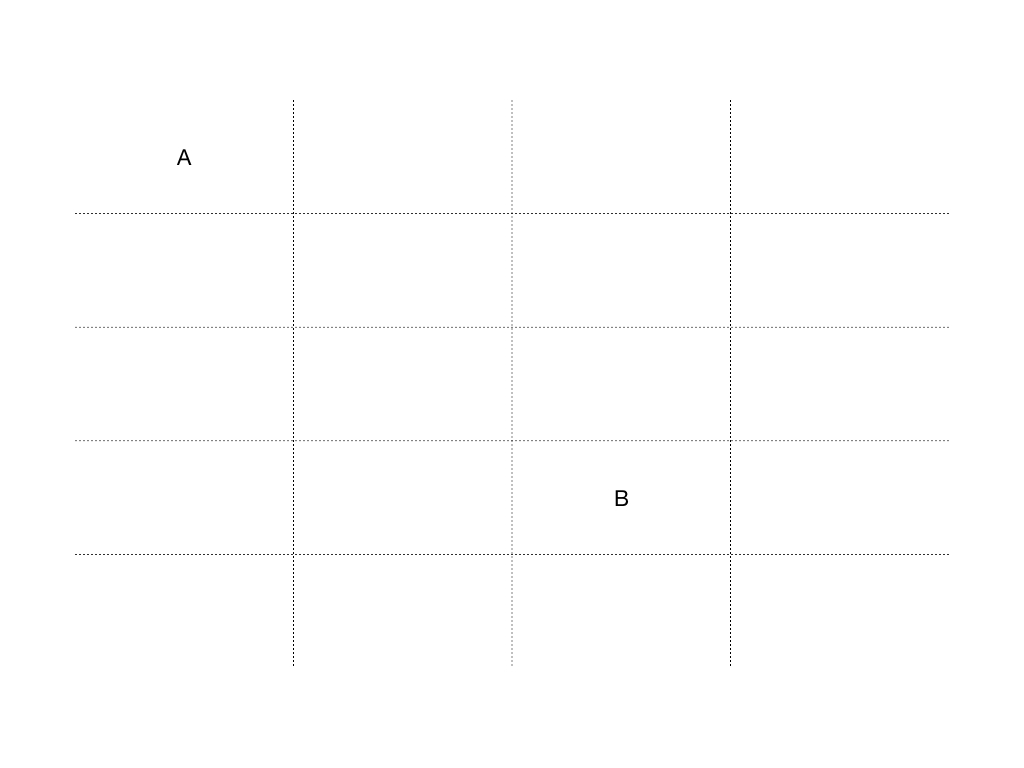
如果上面是A到B的移动过程中,只能往左边或者右边移动的时候。A可能存在直接走到最右则,而无法到达B,因为题设条件限制。所以这时从A思考,会产生回溯,当某一步不能达到目标的时候,要回退上一次的计算,并且选择另外一个路径执行(基于计算另外一个能够达到目标的子问题)。所以,就产生了不确定性,需要回溯,可以根据B的X和Y坐标,控制边界,减少不必要的回溯。
如果上面的问题是从目的地思考,反推上一步的来源。那么这个问题就清晰了。由于题设限制只能往右边或者下边移动,所以到达B点时,肯定是从左边或者从上边的格子过来的。这样问题就清晰了,到达B点,从B的左边格子过来+从B的上边格子过来这两种情况,通过枚举情形,问题是确定的,而且这些计算不用回溯,控制好逆向的路径,不越过A的X和Y坐标就好了。直到接近A点。不过,当前这种从规模高到低的问题,存在重复计算的问题,需要设置计算缓存(备忘录模式)
如果从上方考到思考过程,我们可以枚举一下情形,从小规模到大规模,或者从大规模到小规模来寻找思路。

